Using AI Prompts to Create STL Files for 3D Printing
June 24, 2025
A blog discussing investigations and insights pertaining to physics, robotics, machine learning, or you know like, whatever.
June 24, 2025
April 4, 2025
January 19, 2025
December 15, 2024

A panorama overlooking the Salinas Valley before heading down into King City
November 14, 2024
February 13, 2023
January 1, 2023
Figure 1: The 1D robot (i.e. a finger) accelerates in response to an initial applied force, then coasts until bouncing off the wall. The force sensor on the finger tip records the touch interaction with the wall. The robot then re-accelerates with sufficient force to overcome the static friction of the object and thus push it. Finally, the robot’s applied force turns off and since the robot has a larger drag force, it decelerates and falls behind the object.
February 19, 2022
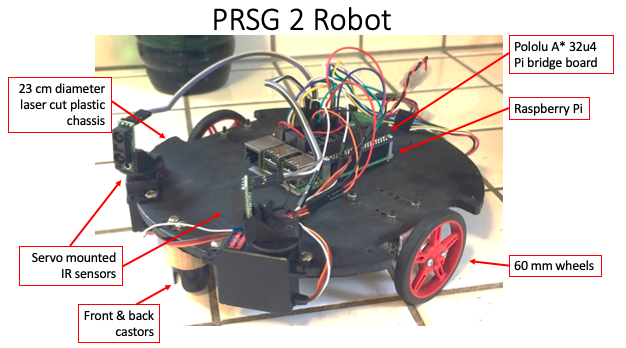 My PRSG2 robot
My PRSG2 robot